Description
- Unit Test 작성
Source
/**
* (y, x) 좌표를 표현하는 자료구조
*
typedef struct pos {
int y;
int x;
} POS;
/**
* 화재 감지 센서 인터페이스
*
class FireSensor
{
public:
/**
* 현재 화재를 감지한 센서의 위치 값을 반환
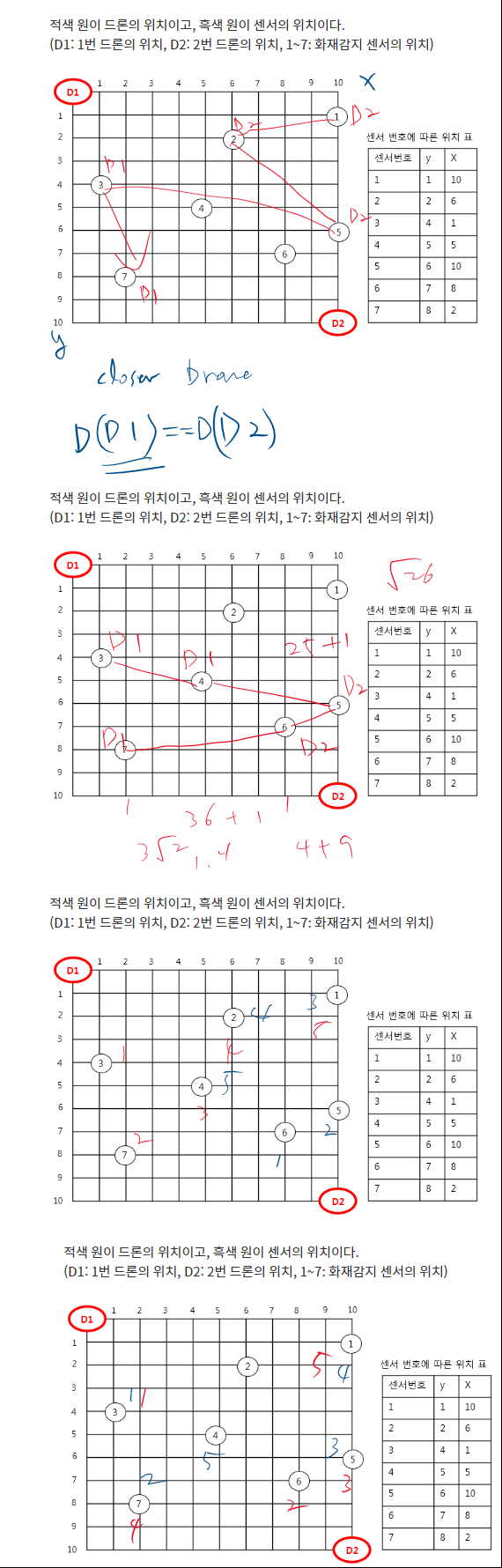
* @return POS 타입의 (y, x) 좌표. 예를 들어, 1번 센서에서 화재를 감지한 경우 {1, 10}을 반환
*
virtual POS getSensorPosition() = 0;
};
/**
* 드론 관제 시스템 (테스트 대상)
*
class DroneController
{
POS currentDrone1_ = { 0,0 };
POS currentDrone2_ = { 10,10 };
FireSensor* sensor_;
...
public:
DroneController(FireSensor* sensor) : sensor_(sensor) { ... }
/**
* 화재가 발생한 위치를 얻어와서 현재 드론과의 위치를 계산하여 가장 가까운 드론을 선택하는 함수 (테스트 대상)
* 다음 위치 계산을 위해 선택된 드론의 위치를 저장해둔다. (선택된 드론이 해당 좌표로 이동함을 가정)
* @return 화재가 발생한 곳과 가장 가까운 드론의 번호. 1 혹은 2
*
int selectDrone()
{
POS sensed = sensor_->getSensorPosition(); // 화제를 감지한 센서의 위치 획득
int dx = currentDrone1_.x - sensed.x;
int dy = currentDrone1_.y - sensed.y;
int dist1 = dx*dx + dy*dy;
dx = currentDrone2_.x - sensed.x;
dy = currentDrone2_.y - sensed.y;
int dist2 = dx*dx + dy*dy;
if (dist2 >= dist1)
{
currentDrone1_ = sensed;
return 1;
}
else
{
currentDrone2_ = sensed;
return 2;
}
}
...
}make Stub Class
// 문제 3. 테스트 코드 작성
class StubSensor: public FireSensor
{
public:
POS m_testPos;
POS getSensorPosition(){
return m_testPos;
}
};
void test_3_1()
{
// TODO: 항목 3-1.
// 화재 위치가 센서 1, 7, 2, 3, 5 순으로 감지되는 상황을 재현하는 테스트 코드
StubSensor sensor;
DroneController dc((FireSensor*)&sensor);
sensor.m_testPos.y = 1; sensor.m_testPos.x = 10;
dc.selectDrone();
sensor.m_testPos.y = 8; sensor.m_testPos.x = 2;
dc.selectDrone();
sensor.m_testPos.y = 2; sensor.m_testPos.x = 6;
dc.selectDrone();
sensor.m_testPos.y = 4; sensor.m_testPos.x = 1;
dc.selectDrone();
sensor.m_testPos.y = 6; sensor.m_testPos.x = 10;
dc.selectDrone();
}GitHub (n/a)