sudo apt-get install -y vim apt-utils \
ros-melodic-desktop-full \
libmuparser-dev \
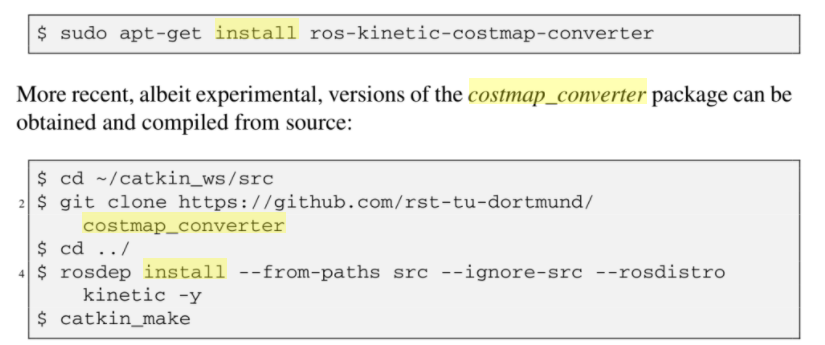
ros-melodic-costmap-converter \
ros-melodic-costmap-2d
#cmake \
#pkg-config \
#python-rospkg \
#python-rosdep \
#python-rosinstall-generator \
#python-wstool \
#python-rosinstall build-essential \
#ros-melodic-cv-bridge \
#ros-melodic-controller-manager \
#ros-melodic-diagnostic-updater \
#ros-melodic-dynamic-reconfigure \
#ros-melodic-geometry-msgs \
#ros-melodic-message-generation \
#ros-melodic-message-runtime \
#ros-melodic-nav-msgs \
#ros-melodic-pluginlib \
#ros-melodic-roscpp \
#ros-melodic-roscpp-git \
#ros-melodic-std-msgs \
#ros-melodic-roslint \
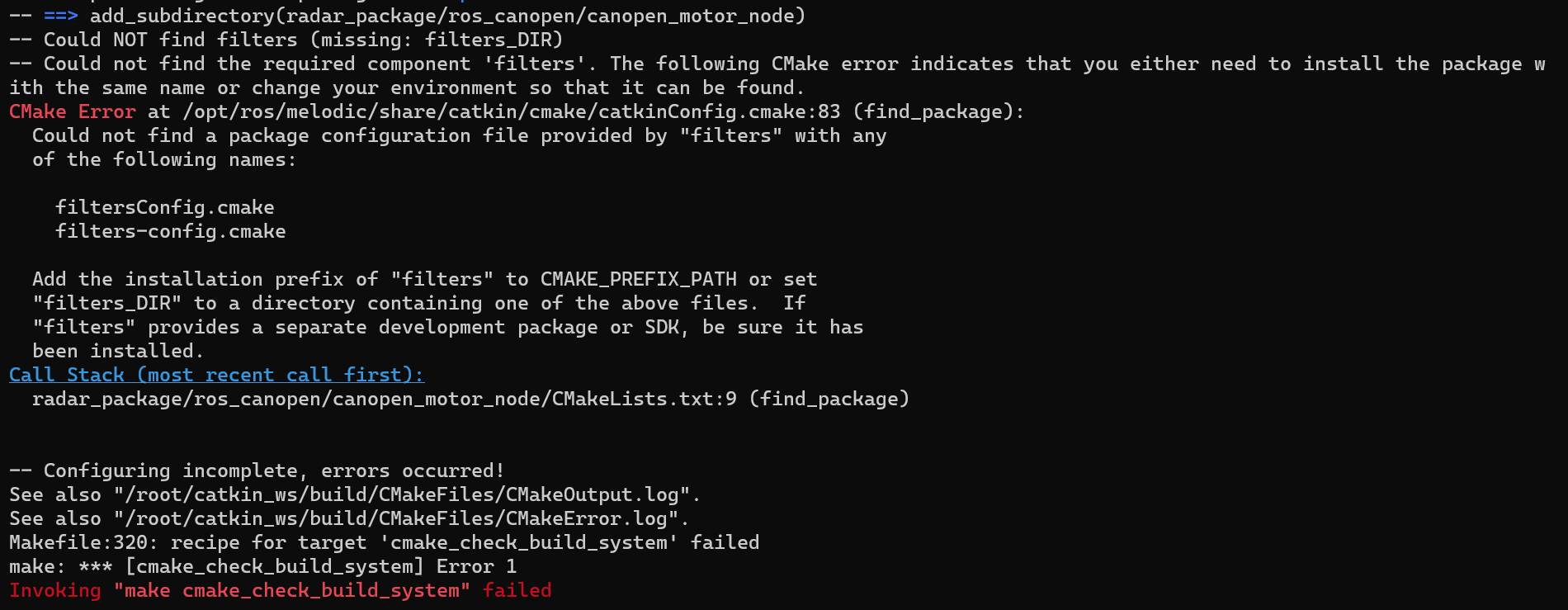
#ros-melodic-filters \
#ros-melodic-joint-limits-interface \
#ros-melodic-catkin \
#ros-build-tools \
#ros-melodic-tf2-geometry-msgs \
#ros-melodic-rviz \
sudo apt-get install ros-$ROS_DISTRO-turtle-tf2 ros-$ROS_DISTRO-tf2-tools ros-$ROS_DISTRO-tf
roslaunch turtle_tf2 turtle_tf2_demo.launch
 Cool Wind on Study
Cool Wind on Study