 Cool Wind on Study
Cool Wind on Study
ROS - ROBOTIS Lecture 1, 2, 4 (with Links)
ROS References
-
ROS Robotis Lecture Youtube
- Material Github
- ROS 한글책 Github
- 로열모 (로봇공학을 위한 열린모임) Facebook
- ROS (Robot Operating System)
- OPROS (Open Platform for Robotic Services)
- OpenRTM-aist
- 오로카 Naver Cafe
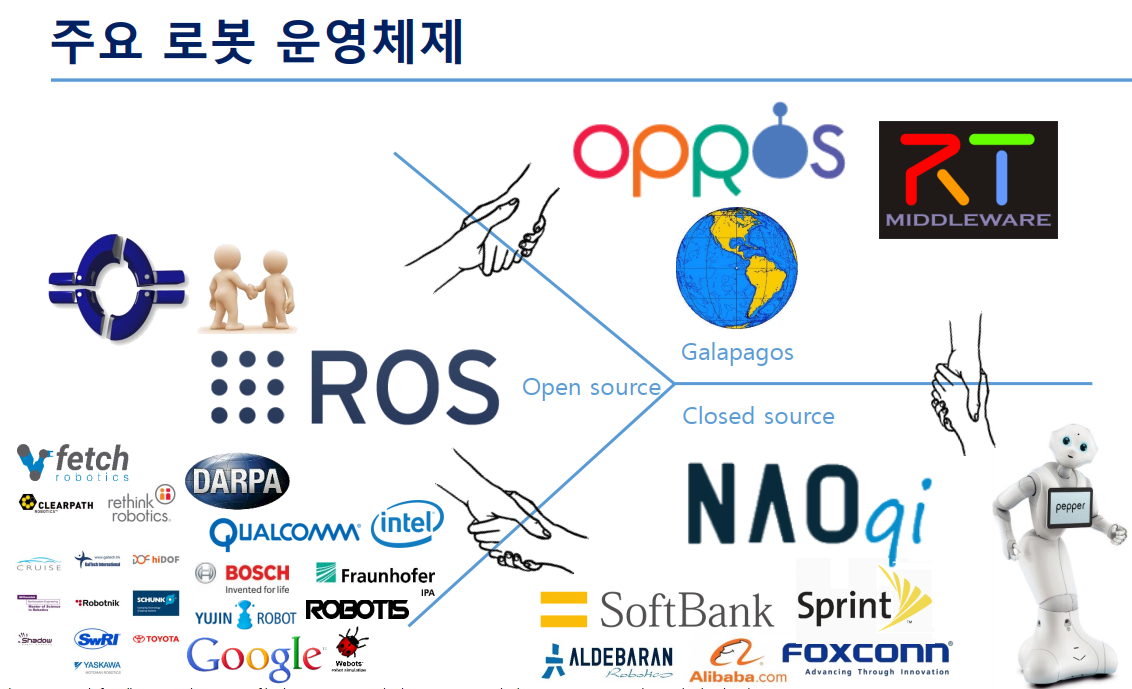
Robotics OS 종류
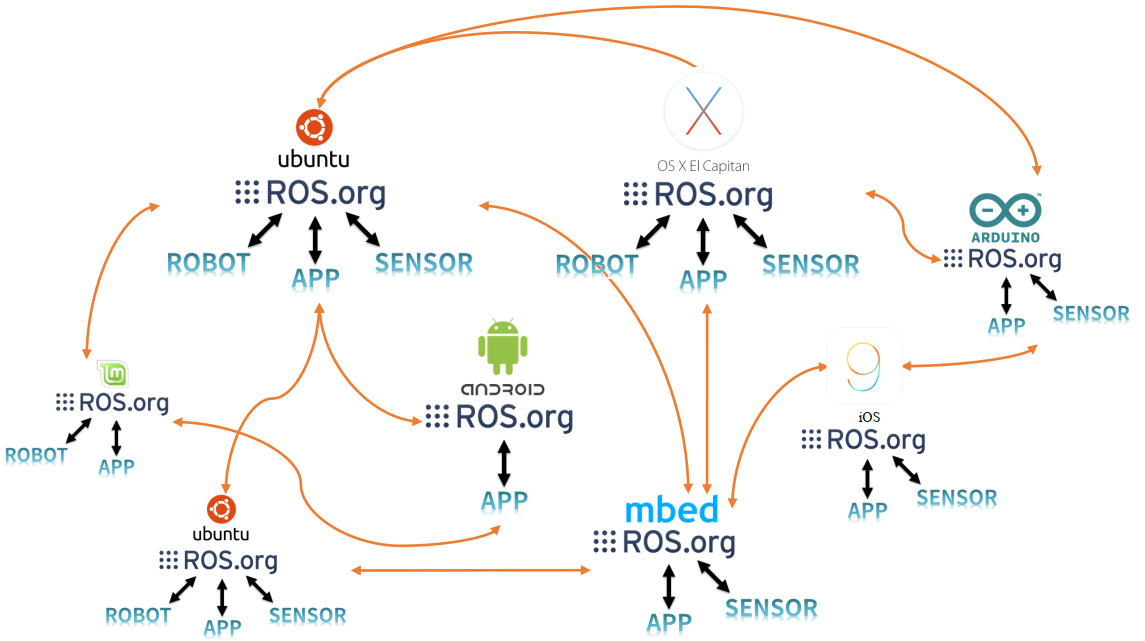
Communication b/w Heterogeneous Multi-devices
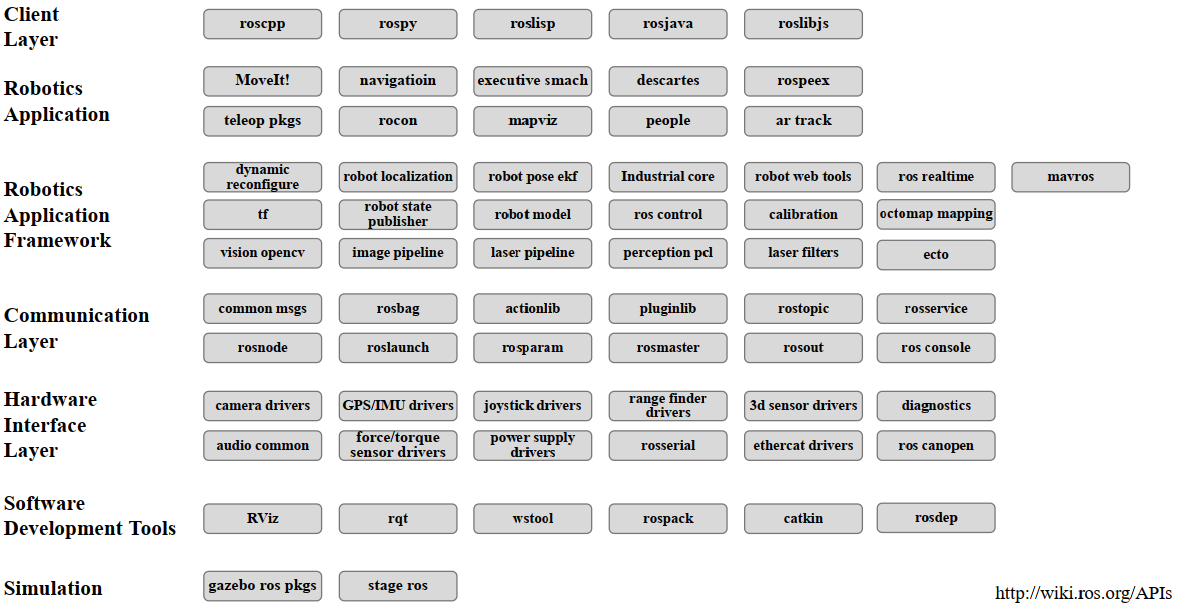
Structure of ROS
Features of ROS
- Communication Function
- Node 간 Data 통신을 제공
- 통상적 Middleware로 지칭되는 Message 전달 Interface 지원
- Message parsing
- Robot 개발 시에 빈번히 사용되는 통신 System 제공
- Capsulation 및 Code reuse 를 위한 Node 간 Message 전달 Interface
- Message의 기록 및 재생
- Node 간 송/수신되는 Data인 Message를 저장하고 필요시에 재사용가능
- 저장된 Message를 기반으로 반복적인 실험 가능, Algorithm 개발에 용이함
- Message 사용으로 인한 다양한 Programming 언어 사용 가능
- Node 간의 Data 교환이 Message로 이루어지므로 각 Node는 서로 다른 언어로 작성 가능
- 분산 매개 변수 System
- System에서 사용되는 변수를 Global key value로 작성하여 공유 및 수정하여 실시간으로 반영 가능
-
Others for Robots
- Standard Message Definition for Robot
- Camera, IMU, Laser 등의 Sensor/Odometer, 경로 및 지도 등의 Navigation Data 등의 표준 Message를 정의 하여 Module화, 협업 작업을 유도, 효율성 향상
- Robot Geometry library
- Robot, Sensor 등의 상대적 좌표를 Tree화 하는 TF(TransForm) 제공
- Robot Descriptive Language
- Robot의 물리적 특성을 설명하느 XML 문서 기술
- E.g. URDF
- 진단 System
- Robot의 Status를 한 눈에 파악할 수 있는 진단 System 제공
- Sensing/Recognition
- Sensor driver, Sensing/Recognition Level의 Library 제공
- Navigation
- Robot에서 많이 사용되는 Robot의 Pose(위치,자세) 추정, 지도상의 자기 위치 추정 Function 제ㅑ
- 지도 작성에 필요한 SLAM, 작성된 지도 내에서 목적지를 찾아가는 Navigation Library를 제공
- Manipulation
- Robot Arm에 사용되는 IK, FK는 물론, 응용단의 Pick and Place를 지원하는 다양한 Manipulation Library 제공
- GUI 형태의 Manipulation Tools 제공(MoveIt!)
- Standard Message Definition for Robot
-
Various development tools
- Robot 개발에 필요한 다양한 개발 도구를 제공
- Robot의 개발 효율성 향상
- Command-Line Tools
- GUI 없이 ROS에서 제공되는 명령어로만 로봇 Access 및 거의 모든 ROS 기능 소화
- RViz
- 강력한 3D 시각화 Tool 제공
- Laser, Camera 등의 Sensor Data를 시각화
- Robot 외형과 계획된 동작을 표현
- RQT
- Graphic Interface 개발을 위한 Qt 기반 Framework 제공
- Node와 Node간 연결 정보 표시 (rqt_graph)
- Encoder, 전압, 또는 시간이 지남에 따라 변화하는 숫자를 Plotting(rqt_plot)
- Data를 Message 형태로 기록하고 재생(rqt_bag)
- Gazebo
- 3D Simulator
- Physics Engine을 탑재, Robot, Sensor, 환경 Model 등을 지원
- ROS와의 높은 호환성
- 3D Simulator
ROS Release Schedule과 Version 선택
- ROS Releases
- 2020.05.23 - Noetic Ninjemys (LTS)
- Noetic Ninjemys (EOL=May 2025)
- 2018.05.23 - Melodic Morenia (LTS)
- Melodic Morenia (EOL=May 2023)
- 2017.05.23 - Lunar Loggerhead
- Lunar Loggerhead (EOL=May, 2019)
- 2016.05.23 - Kinetic Kame (LTS) 추천
- Kinetic Kame (EOL=April, 2021)
- 2015.05.23 - Jade Turtle
- Jade Turtle (EOL=May, 2017)
- 2014.07.22 - Indigo Igloo (LTS)
- Indigo Igloo (EOL=April, 2019)
- 2013.09.04 - Hydro Medusa
- 2012.12.31 - Groovy Galapagos
- 2012.04.23 - Fuerte Turtle
- 2011.08.30 - Electric Emys
- 2011.03.02 - Diamondback
- 2010.08.02 - C Turtle
- 2010.03.02 - Box Turtle
- 2010.01.22 - ROS 1.0
- 2020.05.23 - Noetic Ninjemys (LTS)
- Version selection
- Linux
- 5년간 기술 지원되는 최신 LTS Version의 Ubuntu 선택
- 2년마다 매년 4월 LTS Version Release, Release 3개월 이 후
- 16.04, 18.04
- 2년마다 매년 4월 LTS Version Release, Release 3개월 이 후
- 5년간 기술 지원되는 최신 LTS Version의 Ubuntu 선택
- ROS
- 2년마다 매년 5월 LTS Version Release, Release 3개월 이 후
- Gazebo
- “gazebosim.org” 에서 ROS 호환성 정보 검토 후 사용
- 2019년 상반기 시점 추천 버전
- Ubuntu 16.04
- ROS Kinetic Kame
- Gazebo 7.x
- Linux