 Cool Wind on Study
Cool Wind on Study
How to add a new module in docker container
Related Posts
Step by step guide
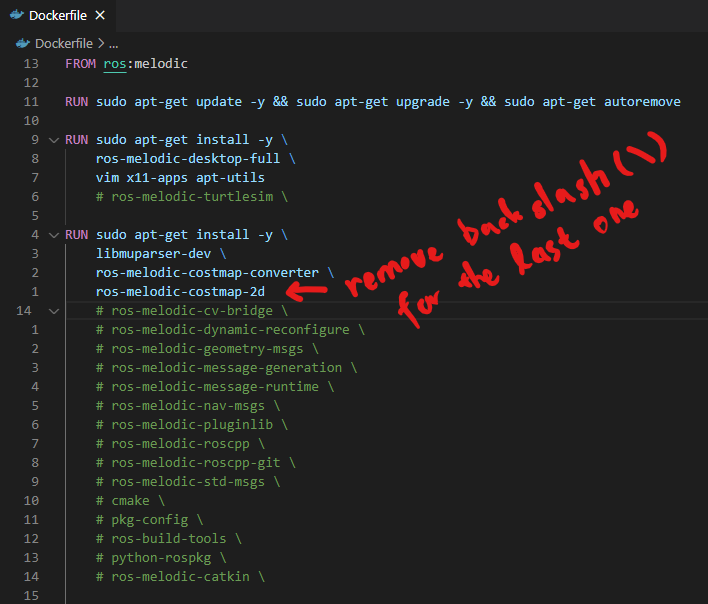
Modify Dockerfile
cd ~/SensorFusion/ros
vim Dockerfile
# surely your can use gedit or vscode
- Add a new module to be installed in the docker container after the command “sudo apt-get install -y "
- The back slash (\) make the next line to be joined to previous one. So there is no need to put it on the last line.
- You can bring another RUN header for your own shell command.
Temporally modify the run-docker.sh to use your own container to be built with the Dockerfile
cd ~/SensorFusion/ros/catkin_ws
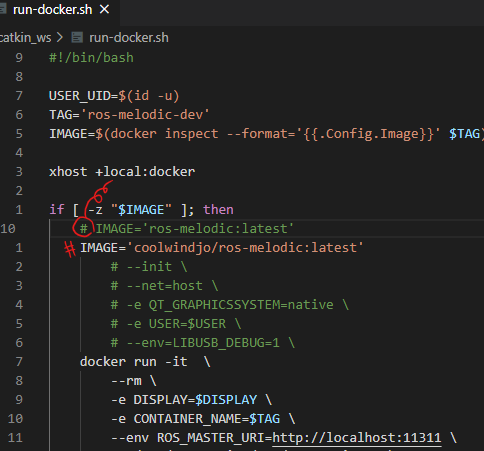
vim run-docker.sh
# surely your can use gedit or vscode
- Replace the “IMAGE=’coolwindjo/ros-melodic:latest’” with “IMAGE=’ros-melodic:latest’” by removing and adding sharps(#)
Execute the script for building the Dockerfile and running the corresponding docker container
$ cd ~/SensorFusion/ros
$ chmod 755 build_and_run.sh
$ ./build_and_run.sh
...
...
Test your new module
- Now, you can test your new module in the new docker container.
Push the Dockerfile only and reset the others
git add ros/Dockerfile
git commit -m "update the Dockerfile by adding new module"
git push
git reset --hard HEAD