 Cool Wind on Study
Cool Wind on Study
ROS Basic Programming
ROS basics
-
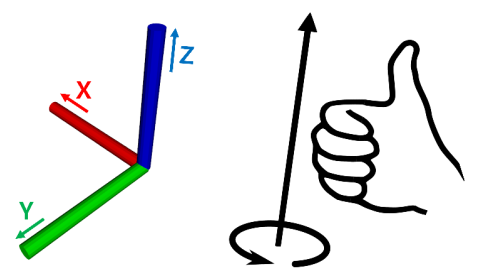
- x: forward
- y: left
- z: upward
-
Quantity Unit angle radian length meter mass kilogram frequency hertz force newton power watt voltage volt current ampere time second temperature celsius -
Object Naming Rule Example Package under_scored first_ros_package Topic, Service under_scored raw_image File under_scored turtlebot3_fake.cpp Namespace under_scored ros_awesome_package Variable under_scored string_table_name Type CamelCased typedef int32_t PropertiesNumber Class CamelCased class UrlTable Structure CamelCased struct UrlTableProperties Enumeration CamelCased enum ChoiceNumber Function camelCased addTableEntry() Method camelCased void setNumEntries(int32_t num_entries) Constant ALL_CAPITALS const uint8_t DAYS_IN_A_WEEK = 7; Macro ALL_CAPITALS #define PI_ROUNDED 3.0
ROS Message Communications
-
Overall Diagram
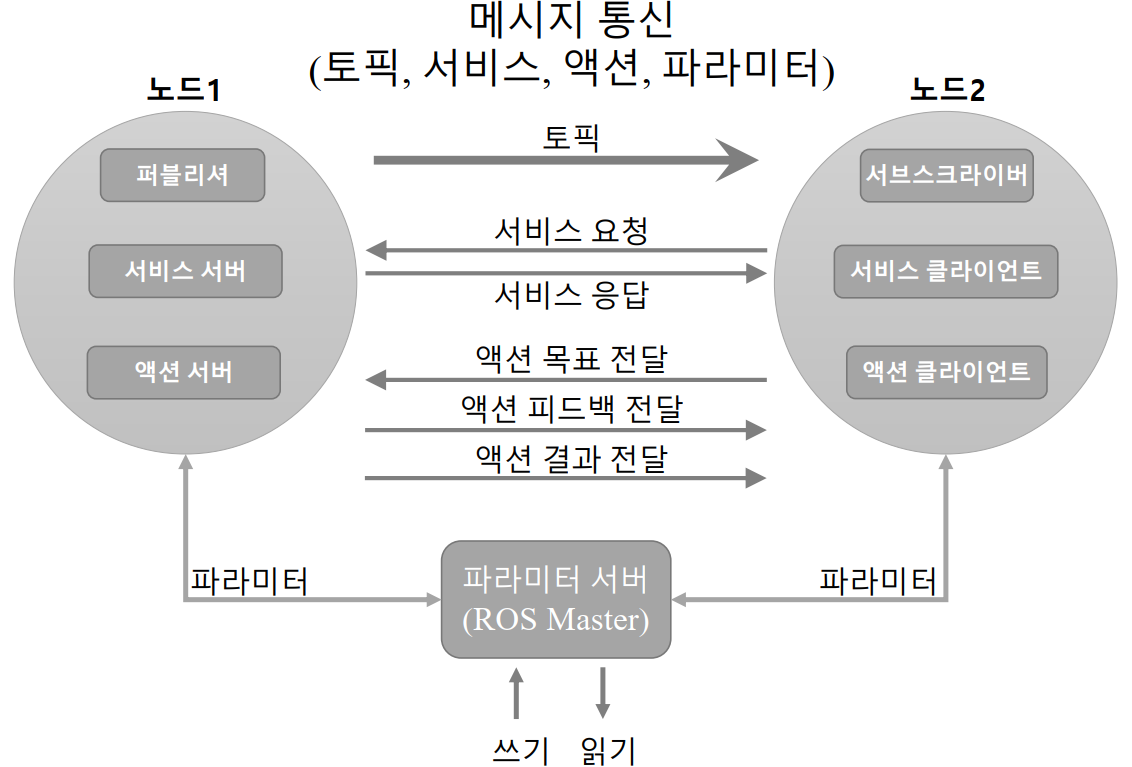
- Topic
- Service
- Action
- Parameter
ROS Package Creation
Create ROS Package for Topic Test
cw
cd src
catkin_create_pkg ros_tutorials_topic_josh message_generation std_msgs roscpp
<?xml version="1.0"?>
<package format="2">
<name>ros_tutorials_topic_josh</name>
<version>0.1.0</version>
<description>The ros_tutorials_topic_josh package</description>
<maintainer email="coolwind@hotmail.co.kr">Jo, SeungHyeon</maintainer>
<license>Apache 2.0</license>
<author email="coolwind@hotmail.co.kr">Jo, SeungHyeon</author>
<url type="website">http://www.robotis.com</url>
<url type="repository">https://github.com/ROBOTIS-GIT/ros_tutorials.git</url>
<url type="bugtracker">https://github.com/ROBOTIS-GIT/ros_tutorials/issues</url>
<buildtool_depend>catkin</buildtool_depend>
<depend>message_generation</depend>
<depend>roscpp</depend>
<depend>std_msgs</depend>
<export>
</export>
</package>
cmake_minimum_required(VERSION 2.8.3)
project(ros_tutorials_topic_josh)
find_package(catkin REQUIRED COMPONENTS
message_generation
roscpp
std_msgs
)
add_message_files(
FILES
MsgTutorial.msg
)
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
LIBRARIES ros_tutorials_topic_josh
CATKIN_DEPENDS roscpp std_msgs
)
###########
### Build ##
###########
include_directories(
${catkin_INCLUDE_DIRS}
)
add_executable(topic_publisher_josh src/topic_publisher.cpp)
add_executable(topic_subscriber_josh src/topic_subscriber.cpp)
add_dependencies(topic_publisher_josh ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(topic_subscriber_josh ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(topic_publisher_josh
${catkin_LIBRARIES}
)
target_link_libraries(topic_subscriber_josh
${catkin_LIBRARIES}
)
Create ROS Package for Service Test
cw
cd src
catkin_create_pkg ros_tutorials_service_josh message_generation std_msgs roscpp
<?xml version="1.0"?>
<package format="2">
<name>ros_tutorials_service_josh</name>
<version>0.1.0</version>
<description>The ros_tutorials_service_josh package</description>
<maintainer email="coolwind@hotmail.co.kr">Jo, SeungHyeon</maintainer>
<license>Apache 2.0</license>
<author email="coolwind@hotmail.co.kr">Jo, SeungHyeon</author>
<url type="website">http://www.robotis.com</url>
<url type="repository">https://github.com/ROBOTIS-GIT/ros_tutorials.git</url>
<url type="bugtracker">https://github.com/ROBOTIS-GIT/ros_tutorials/issues</url>
<buildtool_depend>catkin</buildtool_depend>
<depend>message_generation</depend>
<depend>roscpp</depend>
<depend>std_msgs</depend>
<export>
</export>
</package>
cmake_minimum_required(VERSION 2.8.3)
project(ros_tutorials_service_josh)
find_package(catkin REQUIRED COMPONENTS
message_generation
roscpp
std_msgs
)
add_service_files(
FILES
SrvTutorial.srv
)
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
LIBRARIES ros_tutorials_topic_josh
CATKIN_DEPENDS roscpp std_msgs
)
###########
### Build ##
###########
include_directories(
${catkin_INCLUDE_DIRS}
)
add_executable(service_server_josh src/service_server.cpp)
add_executable(service_client_josh src/service_client.cpp)
add_dependencies(service_server_josh ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(service_client_josh ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(service_server_josh
${catkin_LIBRARIES}
)
target_link_libraries(service_client_josh
${catkin_LIBRARIES}
)
Message File Creation
Create Message File for Topic Test
roscd ros_tutorials_topic_josh
mkdir msg
cd msg
vim MsgTutorial.msg
time stamp
int32 data
- Message type can be not only time and int32, but also
- built-in types: bool, int8, int16, float32, string, time, duration, etc.
- common_msgs: common messages being used in ROS
- Message reference
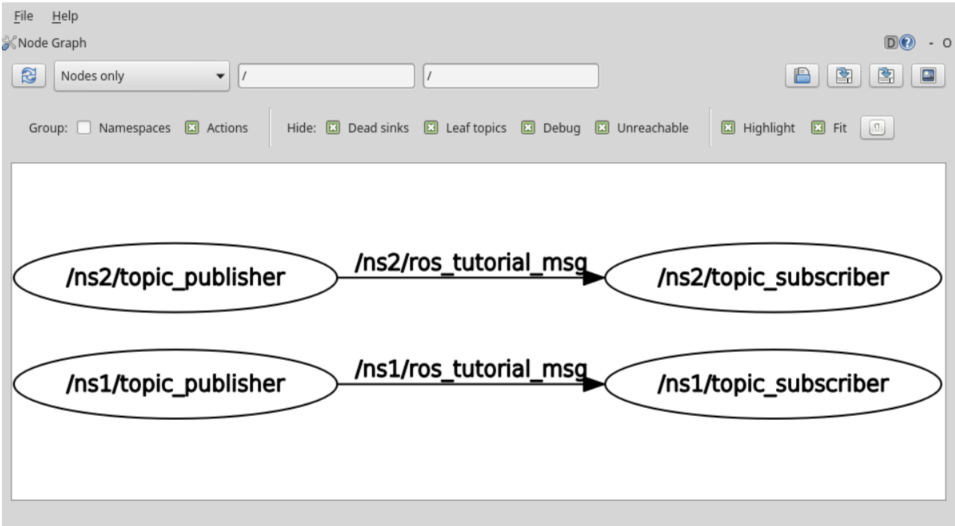
Create Launch File for Topic Test
roscd ros_tutorials_topic_josh
mkdir launch
cd launch
vim union.launch
<launch>
<group ns="ns1">
<node pkg="ros_tutorials_topic_josh" type="topic_publisher_josh" name="topic_publisher"/>
<node pkg="ros_tutorials_topic_josh" type="topic_subscriber_josh" name="topic_subscriber"/>
</group>
<group ns="ns2">
<node pkg="ros_tutorials_topic_josh" type="topic_publisher_josh" name="topic_publisher"/>
<node pkg="ros_tutorials_topic_josh" type="topic_subscriber_josh" name="topic_subscriber"/>
</group>
</launch>
| Launch Tag | Description |
|---|---|
| launch | begin and end of the roslaunch statement |
| node | configure the node running specification, such as package, type, name |
| machine | configure the machine specification the node running on, such as machine name, address, ros-root, ros-package-path, etc. |
| include | include the other launch files from the same or different packages to be run as one launch file |
| remap | rename the ROS variables used in the running nodes, such as node’s name, topic’s name, etc. |
| env | set path and IP, etc. (hardly used) |
| param | set parameter’s name, type, value, etc. |
| rosparam | check and modify parameters in the way how rosparam commands (load, dump, delete, etc.) do |
| group | make groups of nodes |
| test | test node running with additional specifications |
| arg | set or change the value of parameters |
<launch>
<arg name="update_period" default="10" />
<param name="timing" value="$(arg update_period)" />
</launch>
roslaunch my_package my_package.launch updaete_period:=30
Create Service File for Service Test
roscd ros_tutorials_service_josh
mkdir srv
cd srv
vim SrvTutorial.srv
int64 a
int64 b
---
int64 result
- Messages are separated by “---” into the set for request and the others for response.
- Message type can be not only time and int32, but also
- built-in types: bool, int8, int16, float32, string, time, duration, etc.
- common_msgs: common messages being used in ROS
- Message reference
Source File Creation
Create Publisher and Subscriber Nodes for Topic Test
-
Publisher Node Creation
roscd ros_tutorials_topic_josh/src vim topic_publisher.cpp#include "ros/ros.h" // ROS 기본 헤더파일 #include "ros_tutorials_topic_josh/MsgTutorial.h"// MsgTutorial 메시지 파일 헤더(빌드 후 자동 생성됨) int main(int argc, char **argv) // 노드 메인 함수 { ros::init(argc, argv, "topic_publisher_josh"); // 노드명 초기화 ros::NodeHandle nh; // ROS 시스템과 통신을 위한 노드 핸들 선언 // 퍼블리셔 선언, ros_tutorials_topic_josh 패키지의 MsgTutorial 메시지 파일을 이용한 // 퍼블리셔 ros_tutorial_pub 를 작성한다. 토픽명은 "ros_tutorial_msg" 이며, // 퍼블리셔 큐(queue) 사이즈를 100개로 설정한다는 것이다 ros::Publisher ros_tutorial_pub = nh.advertise<ros_tutorials_topic_josh::MsgTutorial>("ros_tutorial_msg", 100); // 루프 주기를 설정한다. "10" 이라는 것은 10Hz를 말하는 것으로 0.1초 간격으로 반복된다 ros::Rate loop_rate(10); // MsgTutorial 메시지 파일 형식으로 msg 라는 메시지를 선언 ros_tutorials_topic_josh::MsgTutorial msg; // 메시지에 사용될 변수 선언 int count = 0; while (ros::ok()) { msg.stamp = ros::Time::now(); // 현재 시간을 msg의 하위 stamp 메시지에 담는다 msg.data = count; // count라는 변수 값을 msg의 하위 data 메시지에 담는다 ROS_INFO("send msg = %d", msg.stamp.sec); // stamp.sec 메시지를 표시한다 ROS_INFO("send msg = %d", msg.stamp.nsec); // stamp.nsec 메시지를 표시한다 ROS_INFO("send msg = %d", msg.data); // data 메시지를 표시한다 ros_tutorial_pub.publish(msg); // 메시지를 발행한다 loop_rate.sleep(); // 위에서 정한 루프 주기에 따라 슬립에 들어간다 ++count; // count 변수 1씩 증가 } return 0; } -
Subscriber Node Creation
roscd ros_tutorials_topic_josh/src vim topic_subscriber.cpp#include "ros/ros.h" // ROS 기본 헤더파일 #include "ros_tutorials_topic_josh/MsgTutorial.h"// MsgTutorial 메시지 파일 헤더(빌드 후 자동 생성됨) // 메시지 콜백 함수로써, 밑에서 설정한 ros_tutorial_msg라는 이름의 토픽 // 메시지를 수신하였을 때 동작하는 함수이다 // 입력 메시지로는 ros_tutorials_topic_josh 패키지의 MsgTutorial 메시지를 받도록 되어있다 void msgCallback(const ros_tutorials_topic_josh::MsgTutorial::ConstPtr& msg) { ROS_INFO("recieve msg = %d", msg->stamp.sec); // stamp.sec 메시지를 표시한다 ROS_INFO("recieve msg = %d", msg->stamp.nsec); // stamp.nsec 메시지를 표시한다 ROS_INFO("recieve msg = %d", msg->data); // data 메시지를 표시한다 } int main(int argc, char **argv) // 노드 메인 함수 { ros::init(argc, argv, "topic_subscriber_josh"); // 노드명 초기화 ros::NodeHandle nh; // ROS 시스템과 통신을 위한 노드 핸들 선언 // 서브스크라이버 선언, ros_tutorials_topic_josh 패키지의 MsgTutorial 메시지 파일을 이용한 // 서브스크라이버 ros_tutorial_sub 를 작성한다. 토픽명은 "ros_tutorial_msg" 이며, // 서브스크라이버 큐(queue) 사이즈를 100개로 설정한다는 것이다 ros::Subscriber ros_tutorial_sub = nh.subscribe("ros_tutorial_msg", 100, msgCallback); // 콜백함수 호출을 위한 함수로써, 메시지가 수신되기를 대기, // 수신되었을 경우 콜백함수를 실행한다 ros::spin(); return 0; }Create Server and Client Nodes for Service Test
-
Server Node Creation
roscd ros_tutorials_service_josh/src vim service_server.cpp#include "ros/ros.h" // ROS 기본 헤더 파일 #include "ros_tutorials_service_josh/SrvTutorial.h" // SrvTutorial 서비스 파일 헤더 (빌드후 자동 생성됨) // 서비스 요청이 있을 경우, 아래의 처리를 수행한다 // 서비스 요청은 req, 서비스 응답은 res로 설정하였다 bool calculation(ros_tutorials_service_josh::SrvTutorial::Request &req, ros_tutorials_service_josh::SrvTutorial::Response &res) { // 서비스 요청시 받은 a와 b 값을 더하여 서비스 응답 값에 저장한다 res.result = req.a + req.b; // 서비스 요청에 사용된 a, b 값의 표시 및 서비스 응답에 해당되는 result 값을 출력한다 ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b); ROS_INFO("sending back response: %ld", (long int)res.result); return true; } int main(int argc, char **argv) // 노드 메인 함수 { ros::init(argc, argv, "service_server_josh"); // 노드명 초기화 ros::NodeHandle nh; // 노드 핸들 선언 // 서비스 서버 선언, ros_tutorials_service_josh 패키지의 SrvTutorial 서비스 파일을 이용한 // 서비스 서버 ros_tutorials_service_server를 선언한다 // 서비스명은 ros_tutorial_srv이며 서비스 요청이 있을 때, // calculation라는 함수를 실행하라는 설정이다 ros::ServiceServer ros_tutorials_service_server = nh.advertiseService("ros_tutorial_srv", calculation); ROS_INFO("ready srv server!"); ros::spin(); // 서비스 요청을 대기한다 return 0; } -
Client Node Creation
roscd ros_tutorials_service_josh/src vim service_client.cpp#include "ros/ros.h" // ROS 기본 헤더 파일 #include "ros_tutorials_service_josh/SrvTutorial.h" // SrvTutorial 서비스 파일 헤더 (빌드후 자동 생성됨) #include <cstdlib> // atoll 함수 사용을 위한 라이브러리 int main(int argc, char **argv) // 노드 메인 함수 { ros::init(argc, argv, "service_client_josh"); // 노드명 초기화 if (argc != 3) // 입력값 오류 처리 { ROS_INFO("cmd : rosrun ros_tutorials_service_josh service_client_josh arg0 arg1"); ROS_INFO("arg0: double number, arg1: double number"); return 1; } ros::NodeHandle nh; // ROS 시스템과 통신을 위한 노드 핸들 선언 // 서비스 클라이언트 선언, ros_tutorials_service_josh 패키지의 SrvTutorial 서비스 파일을 이용한 // 서비스 클라이언트 ros_tutorials_service_client를 선언한다 // 서비스명은 "ros_tutorial_srv"이다 ros::ServiceClient ros_tutorials_service_client = nh.serviceClient<ros_tutorials_service_josh::SrvTutorial>("ros_tutorial_srv"); // srv라는 이름으로 SrvTutorial 서비스 파일을 이용하는 서비스를 선언한다 ros_tutorials_service_josh::SrvTutorial srv; // 서비스 요청 값으로 노드가 실행될 때 입력으로 사용된 매개변수를 각각의 a, b에 저장한다 srv.request.a = atoll(argv[1]); srv.request.b = atoll(argv[2]); // 서비스를 요청하고, 요청이 받아들여졌을 경우, 응답 값을 표시한다 if (ros_tutorials_service_client.call(srv)) { ROS_INFO("send srv, srv.Request.a and b: %ld, %ld", (long int)srv.request.a, (long int)srv.request.b); ROS_INFO("receive srv, srv.Response.result: %ld", (long int)srv.response.result); } else { ROS_ERROR("Failed to call service ros_tutorial_srv"); return 1; } return 0; }
Create Server and Client Nodes for Parameter Test
-
Server Node Creation
roscd ros_tutorials_service_josh/src vim service_server.cpp#include "ros/ros.h" // ROS 기본 헤더 파일 #include "ros_tutorials_service_josh/SrvTutorial.h" // SrvTutorial 서비스 파일 헤더 (빌드후 자동 생성됨) // 서비스 요청이 있을 경우, 아래의 처리를 수행한다 // 서비스 요청은 req, 서비스 응답은 res로 설정하였다 bool calculation(ros_tutorials_service_josh::SrvTutorial::Request &req, ros_tutorials_service_josh::SrvTutorial::Response &res) { // 서비스 요청시 받은 a와 b 값을 파라미터 값에 따라 연산자를 달리한다. // 계산한 후 서비스 응답 값에 저장한다 switch(g_operator) { case PLUS: res.result = req.a + req.b; break; case MINUS: res.result = req.a - req.b; break; case MULTIPLICATION: res.result = req.a * req.b; break; case DIVISION: if(req.b == 0){ res.result = 0; break; } else{ res.result = req.a / req.b; break; } default: res.result = req.a + req.b; break; } // 서비스 요청에 사용된 a, b 값의 표시 및 서비스 응답에 해당되는 result 값을 출력한다 ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b); ROS_INFO("sending back response: %ld", (long int)res.result); return true; } int main(int argc, char **argv) // 노드 메인 함수 { ros::init(argc, argv, "service_server_josh"); // 노드명 초기화 ros::NodeHandle nh; // 노드 핸들 선언 // 서비스 서버 선언, ros_tutorials_service_josh 패키지의 SrvTutorial 서비스 파일을 이용한 // 서비스 서버 ros_tutorials_service_server를 선언한다 // 서비스명은 ros_tutorial_srv이며 서비스 요청이 있을 때, // calculation라는 함수를 실행하라는 설정이다 ros::ServiceServer ros_tutorials_service_server = nh.advertiseService("ros_tutorial_srv", calculation); ROS_INFO("ready srv server!"); ros::Rate r(10); // 10 hz while (1) { nh.getParam("calculation_method", g_operator); // 연산자를 매개변수로부터 받은 값으로 변경한다 ros::spinOnce(); // 콜백함수 처리루틴 r.sleep(); // 루틴 반복을 위한 sleep 처리 } return 0; } -
Client Node Creation
roscd ros_tutorials_service_josh/src vim service_client.cpp- Use the same file as the one in the Service Test
Build and Run the Sample Packages
cm
Execute Publisher and Subscriber Nodes for Topic Test
rosrun ros_tutorials_topic_josh topic_publisher_josh
rosrun ros_tutorials_topic_josh topic_subscriber_josh
Execute Server and Client Nodes for Service Test
$ rosrun ros_tutorials_service_josh service_server_josh
[ INFO] [1608540574.728446500]: ready srv server!
$ rosrun ros_tutorials_service_josh service_client_josh 2 3
[ INFO] [1608540608.362758300]: send srv, srv.Request.a and b: 2, 3
[ INFO] [1608540608.364704800]: receive srv, srv.Response.result: 5
$ rosservice call /ros_tutorial_srv 10 2
result: 12
Execute Server and Client Nodes for Parameter Test
$ rosrun ros_tutorials_service_josh service_server_josh
[ INFO] [1608540574.728446500]: ready srv server!
$ rosparam list
/calculation_method
/rosdistro
/roslaunch/uris/host_localhost__42759
/rosversion
/run_id
$ rosservice call /ros_tutorial_srv 10 2
result: 12
$ rosparam set /calculation_method 3
$ rosservice call /ros_tutorial_srv 10 2
result: 20